
How do you view the development of the electronic architecture of electric vehicles?
1) Service-oriented software architecture
In order to meet the needs of individualization, functional software development needs to be more agile, and based on this Service oriented Architecture (SOA) is the key to accomplish this task, it can establish dynamic real-time network communication relationship, according to the function of each IP node in the car. Data interaction for application layer services is required.
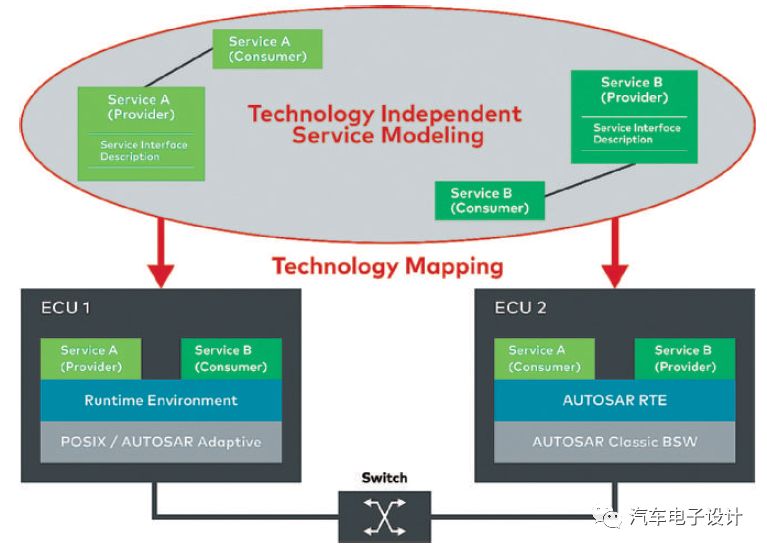
Figure SOA architecture and service distribution
Based on TCP/UDP in AUTOSAR, the SOME/IP communication module is defined to support the communication of SOA architecture. Of course, SOME/IP is also gradually deployed in the AUTOSAR standard.
Refer to http://some-ip.com for an introduction to SOME/IP's roadmap.
AUTOSAR 4.0 – basic support for SOME/IP messages already existing.
AUTOSAR 4.1 – support for SOME/IP-SD and Publish/Subscribe was added.
AUTOSAR 4.2 – the transformer was added for serialization as well as other optimizations.
AUTOSAR 4.3 – fixing some transformer bugs, adding support for large UDP messages with SOME/IP-TP as well as SOME/IP-SD optimizations.
In the field of autonomous driving, especially in the higher-order autopilot scenario requires huge amount of data exchange, to build large data transfers yet to be verified in the future based SOME / IP, at least seen from the Audi zFAS did not use SOME / IP as its Middleware, there are still few applications for dynamic networking in a deterministic network. However, considering the future functional upgrade requirements, it is still necessary to study the networking protocol for large-scale data transmission.
2) Network communication Intra-vehicle network refers to IVN (In Vehicle Network)
V2X/V2V needs to be synchronized with national and regional communication infrastructure planning, and DSRC is not domestic mainstream, and there is not much attention for the time being.
The domestic 5G deployment speed will be very fast, so consider the V2X scenario or combine with China's own situation.
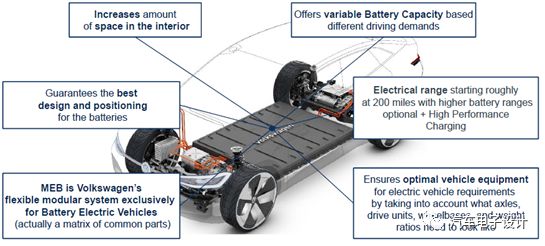
Real network development such as MEB needs to include more practical design requirements:
The standardization of 100BaseT1 and 1000BaseT1 makes Ethernet the first choice for backbone networks, and the entire vehicle needs to add redundant design;
Based on the AVB/TSN Ethernet communication specification, it will become the network core underlying protocol;
Deterministic network data scheduling design to ensure control system delay requirements;
CAN is still the main reason for the main network communication technology inside the vehicle is to meet the time delay of the control function, signal priority preemption and other requirements; the network signal routing requirements under the existing vehicle electronic architecture framework can also be the gateway of the communication core Realization, of course, there are already MOST/FlexRay subnets in some mid- to high-end cars, and Ethernet is mainly used in DoIP and AVB.
Remarks: How long does FlexRay last for a long time, and the extent of penetration is not optimistic.
In the near future, TSN can transform traditional Ethernet into a network bus with priority preemption function similar to CAN, and realize hardware-level network scheduling design based on control function signal flow requirements. The hardware level reference is shown in the figure below. The software level AUTOSAR is also gradually released, but the core signal based time-triggered scheduling design needs to be ensured by the software protocol stack to ensure the delay in the Worst Case scenario meets the functional (application) software requirements. TTTech is in the Ethernet case, and the subsequent design from the core interests of the OEM, including software development, should be mastered by itself.
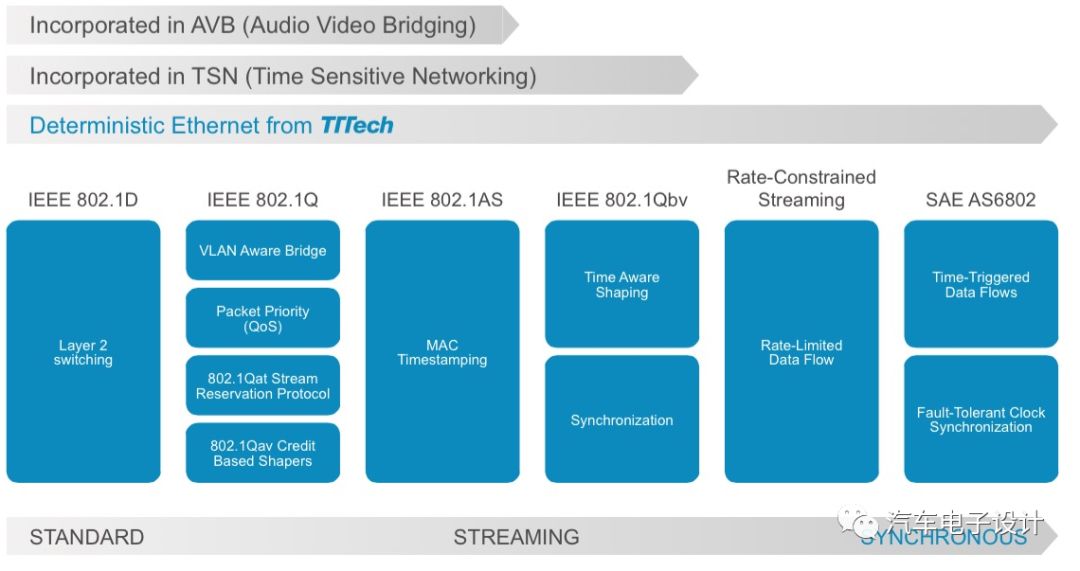
More information on the TSN standard can be found at https://1.ieee802.org/tsn/
The following is an NXP Ethernet gateway chip option table. You can see what the big car companies have for the chip supplier. Of course, there is also an accelerated Ethernet layout in the industry. It can be seen that the TSN basic protocol has been partially implemented in the MAC/PHY.
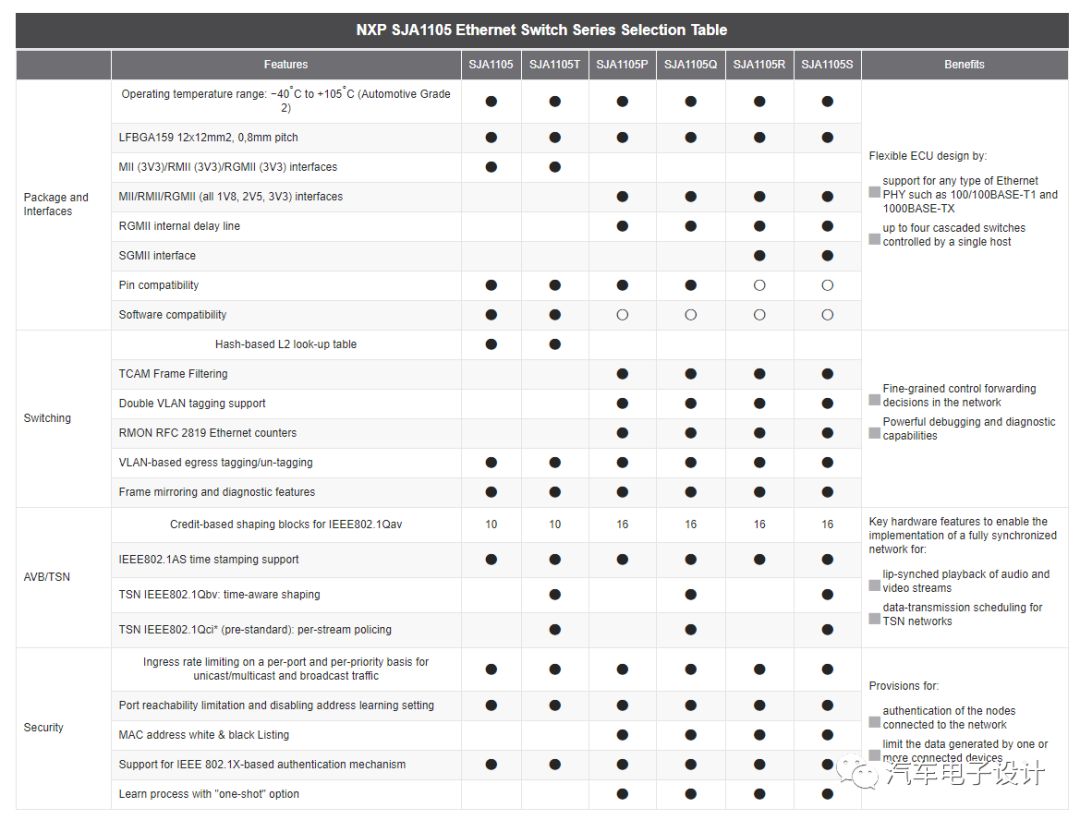
Figure taken from NXP chip Ethernet
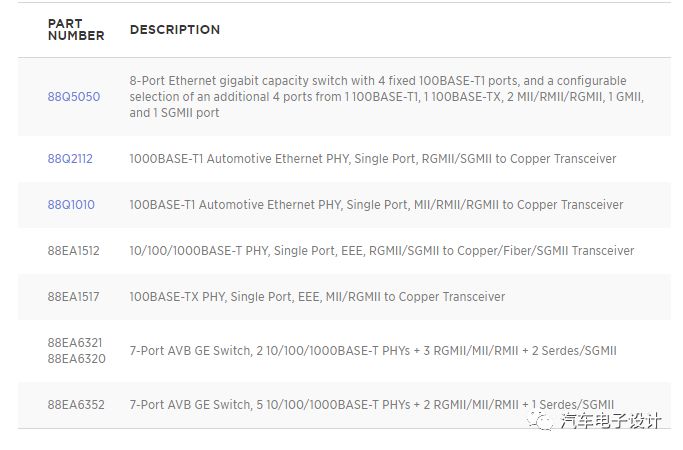
Figure Maverll Ethernet chip Taken
In some materials, 10G bandwidth transmissions are planned in some applications in the future. According to the current on-board Ethernet standard timetable, it is difficult to achieve the specification of the car-level specification by 2020, and the underlying wiring harness needs to be switched from UTP/STP to optical fiber, and the cache/memory read/write of the main chip is improved with the increase of bandwidth. The capability requirements will be greatly improved. I saw that the Intel Go platform has already added the PCIe bus. The development of automotive electronics is really too fast! ! !
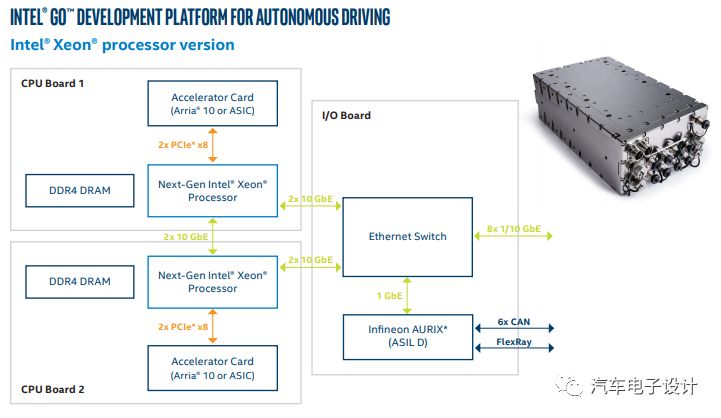
Figure Intel autopilot platform system structure diagram (including main bus technology)
3) Function allocation
Because the domain controller has powerful hardware computing capabilities and rich software interface support, more core functional modules are concentrated in the domain controller, and the system function integration is greatly improved, so that the hardware requirements for function perception and execution are reduced, and Standardization/networking of data interaction interfaces will turn these components into standard parts, reducing the cost of development/manufacture of these parts. In short, peripheral parts only focus on their basic functions, while central (domain) controllers focus on system-level functional implementations.
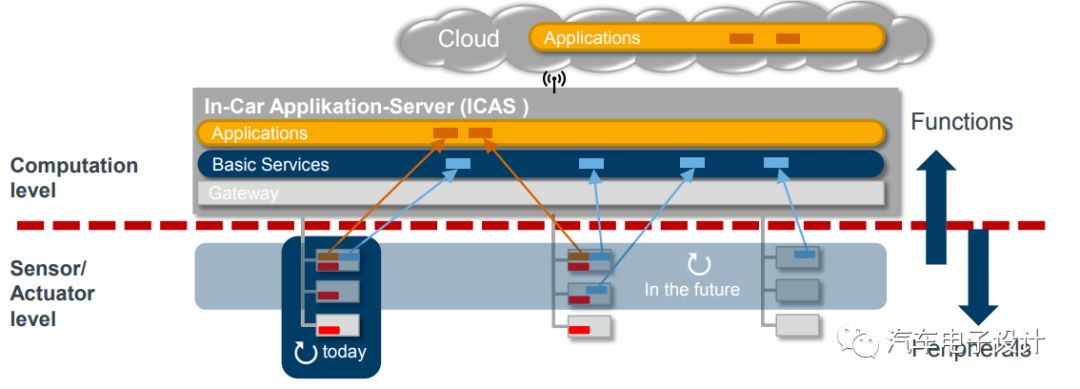
Figure Volkswagen MEB ICAS Software Functional Planning Strategy Excerpt from Vector Congress 2016
Since the public has always been the advocate of the modularization of distributed systems, which ECUs will be merged in the future, and what functions of the algorithm merge will be simplified and downgraded, which is very worthy of attention in the following information release process.

4) Development mode
The upper application may come from different vendors, then the software development process and the later integration test verification will bring more challenges. The traditional cooperation mode between suppliers and OEMs has changed. Tier1 is no longer a big package. OEMs and third-party software vendors will be more involved. If hardware development is the responsibility of another partner, subsequent software/system integration will be a very complex task. As the ultimate responsible party, OEMs will play an increasingly important role in system development, and future success will come from the integration of core technologies in the entire industry chain.
The software development plan is independent of the hardware development plan, the software will be iterative throughout the lifecycle, and the software may span more different hardware devices. In the past, the development of the parts was based on the part SOP node as the reference time for the software development plan, and the hardware solution was determined synchronously.
The future of software integration hidden under this electric platform is worth looking forward to.
5) Controller hardware
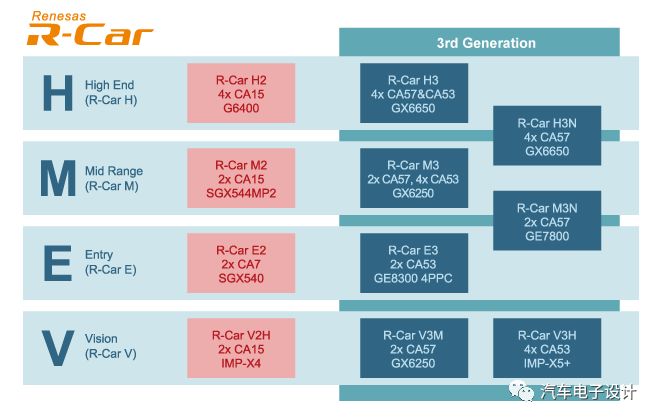
The traditional main controller is mainly based on 32-bit Tricore, PowerPC and 850 architecture microprocessors. For high-volume data, high-speed data transmission, the traditional architecture system can not meet the above application requirements, which is why the new architecture core chip is actively entering. Automotive electronics industry,
You can see that the two latest car chips are transferred from the existing chip platform to ARM.

Https://:MC_50802?tid=sbmenu#MCUMPU
Https://
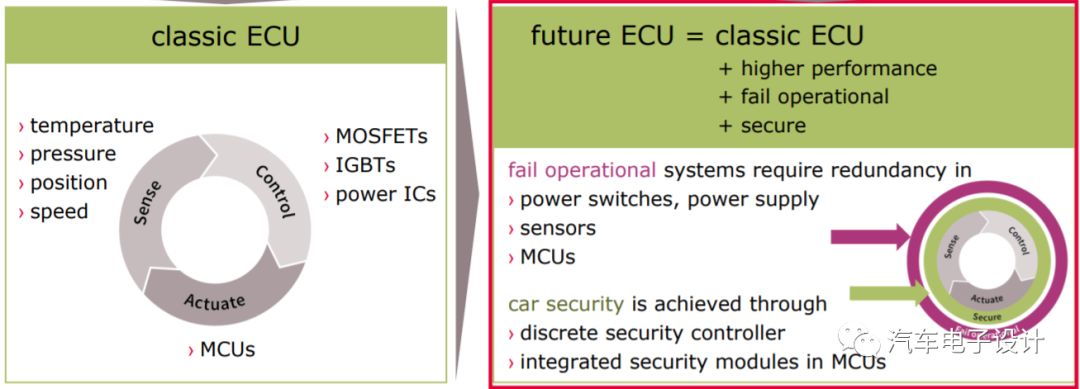
For applications such as Machine Learning, Deep Learning and other technologies in autonomous driving scenarios, additional hardware and software support is required. This is why AI chips, GPUs and other non-automotive computing hardware are valued in the automotive industry. Future for domain controllers The internal hardware must be divided into different types of functions, such as Performance and Safety, according to the functional security level. According to different types of functions, they are allocated into chips with different functional security support. See the multi-core/multi-core chips and redundant from the existing controller hardware architecture. The remaining architecture is the mainstream design of the domain controller design. Although the MEB has not provided the official hardware controller information, but with the Audi zFAS autopilot controller ZFAS, the future domain controller will only add more high performance and reliability on this basis. design.
Conclusion
Digital life in China has been led by the "Internet +" and "shared economy" than the European and American countries, but the automotive industry is also taking advantage of this craze to show good prospects through various themes. The digital application portal around individuals has been controlled by several Internet giants, and it is increasingly difficult for new companies to become one of them. In the personal digital life, a piece of hardware and two accounts are crucial, mobile phone + WeChat / Alipay. The digital life of most people in China has these three things built, and the remaining services or tools can be authorized and manipulated under three kinds of things. So I don't know how MEB came to China to position its role in digital life.
For the mobile phone industry, the following are the top 5 global sales in 2007 and 2017. In the 10 years of intelligence and the rise of Chinese brands, the original 4 front runners have already withdrawn. So is the reshuffle of the auto industry also in this electricization, the intelligent wave has arrived?
| Global sales in 2007 | 2017 global sales |
| Nokia | Samsung |
| Motorola | apple |
| Samsung | Huawei |
| Sony Ericsson | OPPO |
| LG | Millet |
"Non-burning, nicotine for users, low tar content. As the heating temperature (below 500℃) is lower than the combustion temperature of traditional cigarettes (600-900℃), the harmful components produced by tobacco high-temperature combustion pyrolysis and thermal synthesis are reduced, and the release amount of side-flow smoke and environmental smoke (second-hand smoke) is also greatly reduced."
Heating non - combustion products are electronic devices containing tobacco. When you heat them, they produce a nicotine-containing vapor that you can inhale.
They are different from traditional cigarettes and work by heating tobacco to a very low temperature. Tobacco is heated to 350 ° C in a heat-incombustible device, while traditional cigarettes burn at up to 900 ° C.
Still, the temperature at which non-combustion products are heated is high enough to vaporize and inhale harmful chemicals.
Although both are electronic devices, heated non-combustible products are also different from e-cigarettes or steam devices. These usually use chemical liquids and do not necessarily contain nicotine. E-cigarettes tend to heat liquids to around 250 degrees Celsius to produce vapor.
Hnb Device Oem,Hnb Device Patent,Hnb Device,Hnb Device For Sale
Shenzhen MASON VAP Technology Co., Ltd. , https://www.disposablevapepenfactory.com