
Stepper motors and their drives have been widely used in computerized embroidery machines. Computer embroidery machine is the latest product in foreign textile machinery in the 1980s. It uses microcomputer technology to automate the whole process of embroidery, greatly improving the quality and production efficiency of embroidery products. The computerized embroidery machine is a mechatronic product, which is mainly composed of an embroidery body, a power supply system, a computer system, a stepping motor drive actuator system, an embroidery frame, an embroidery head, and a signal sensor. The embroidery operation process is performed by a disk. Or the paper tape machine sends the pattern signal to the computer, and after being processed by the computer, it is sent to the stepping motor drive system and the spindle control system. Finally, the power system drives the embroidery frame and the embroidery head to coordinate movement, and the embroidery starts. In the embroidery process, the stepping motor drives the embroidery frame operation is the most important link, which directly affects the quality of embroidery, embroidery efficiency and noise. The computerized embroidery machine controls the speed of the stepping motor by using a microcomputer. The essence of the control is to control the running curve when the motor drives the load. The first is the calculation of the feed pulse time, which is a software control method. The usual design method is to make the stepping motor run according to the curve of acceleration, uniform speed and deceleration, calculate the timing time offline, write them into the memory, and realize the software control of the stepping motor speed control. The disadvantage of this method is that the computer can only control the stepping motor according to the speed curve given in advance, and can not modify the parameters of the speed curve at any time according to the change of the embroidery working condition, so that the stepping motor runs under a reasonable state. This paper introduces a running curve and calculation method of a stepping motor suitable for use on a computerized embroidery machine, and realizes online calculation of timing parameters. 2 The realization of the curve and its parameters 2.1 The curve achieved (see the drawing) Consider the following sine function: 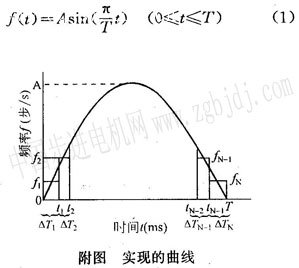 Where π=3.1415926, T is the running time of the stepper motor. The advantages of implementing this function curve are: a. Due to the smooth curve, the stepper motor drives the load to run smoothly, softly and with low noise. b. Meet the characteristics of slow start and slow stop of stepper motor. c. There are clear mathematical expressions that are easy to calculate and implement online. d. For different embroidery conditions, it can be achieved by changing parameters A and T. 2.2 Calculation Assume that a certain working condition when the stepping motor drives the load is that the stepping motor needs to run N steps in the T time. The maximum operating frequency of the motor is FM, and the starting frequency and the ending frequency are both zero. The running curve is f(t) of the formula (1), and T is divided into N parts, that is, ΔT 1 , ΔT 2 , ..., ΔT N , T = ΔT 1 + ΔT 2 + ... + △ T N . Let: t 1 = ΔT 1 t 2 = ΔT 1 + ΔT 2 t N = T = ΔT 1 + ΔT 2 + ... + ΔT N as shown in the figure, let f(t) be at t The area enclosed by the upper half of the shaft is N, f(t) and ΔT 1 , ΔT 2 , ... ΔT N are all enclosed by 1, that is:
Where π=3.1415926, T is the running time of the stepper motor. The advantages of implementing this function curve are: a. Due to the smooth curve, the stepper motor drives the load to run smoothly, softly and with low noise. b. Meet the characteristics of slow start and slow stop of stepper motor. c. There are clear mathematical expressions that are easy to calculate and implement online. d. For different embroidery conditions, it can be achieved by changing parameters A and T. 2.2 Calculation Assume that a certain working condition when the stepping motor drives the load is that the stepping motor needs to run N steps in the T time. The maximum operating frequency of the motor is FM, and the starting frequency and the ending frequency are both zero. The running curve is f(t) of the formula (1), and T is divided into N parts, that is, ΔT 1 , ΔT 2 , ..., ΔT N , T = ΔT 1 + ΔT 2 + ... + △ T N . Let: t 1 = ΔT 1 t 2 = ΔT 1 + ΔT 2 t N = T = ΔT 1 + ΔT 2 + ... + ΔT N as shown in the figure, let f(t) be at t The area enclosed by the upper half of the shaft is N, f(t) and ΔT 1 , ΔT 2 , ... ΔT N are all enclosed by 1, that is: 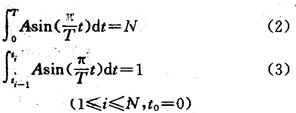 The determination A of the parameter A is the actual maximum operating frequency of the stepping motor, and the value of A can be obtained according to the equation (2).
The determination A of the parameter A is the actual maximum operating frequency of the stepping motor, and the value of A can be obtained according to the equation (2).  It must be ensured that A should be less than the maximum operating frequency of the given motor, otherwise serious consequences will result. 2.2.2 The determination of the parameter t(i=1, 2, ..., N) can be obtained according to formula (3):
It must be ensured that A should be less than the maximum operating frequency of the given motor, otherwise serious consequences will result. 2.2.2 The determination of the parameter t(i=1, 2, ..., N) can be obtained according to formula (3):  Since t0=0, the values ​​of t1, t2, ..., tN-1 can be deduced according to equation (5). △ T1=t1△ T2=t2-t1...△ T N =TT n-1 2.2.3 Calculation of feed pulse frequency fi(i=1,2,...,N) f i =1/△T i (i = 1, 2, ..., N) (6) It is not difficult to prove that fi is a point on the function f(t) = Asin(π/T · t) (t i-1 ≤ t ≤ t i ) . 3 Application example On a computer embroidery machine product, the stepper motor drives the frame to move horizontally, left and right, with a pulse equivalent of 0.1 mm, and a stitch length of 4 ram (the corresponding number of pulses is N=40), given The time is 30ms, the starting and ending frequencies of the stepping motor are all zero, and the time of each feed pulse and the corresponding running frequency are calculated. 4 Conclusion The realization curve is the connection of the average construction of the stepper motor. In a certain feed pulse interval, it is the speed of the ideal sinusoid at a certain moment. The precision achieved is the difference between the area of ​​the curved trapezoid and the unit rectangle. The absolute value. The key to this method is that the computer used must have the processing power of the trigonometric function, and has a higher computing speed, otherwise it is difficult to perform high-speed embroidery.
Since t0=0, the values ​​of t1, t2, ..., tN-1 can be deduced according to equation (5). △ T1=t1△ T2=t2-t1...△ T N =TT n-1 2.2.3 Calculation of feed pulse frequency fi(i=1,2,...,N) f i =1/△T i (i = 1, 2, ..., N) (6) It is not difficult to prove that fi is a point on the function f(t) = Asin(π/T · t) (t i-1 ≤ t ≤ t i ) . 3 Application example On a computer embroidery machine product, the stepper motor drives the frame to move horizontally, left and right, with a pulse equivalent of 0.1 mm, and a stitch length of 4 ram (the corresponding number of pulses is N=40), given The time is 30ms, the starting and ending frequencies of the stepping motor are all zero, and the time of each feed pulse and the corresponding running frequency are calculated. 4 Conclusion The realization curve is the connection of the average construction of the stepper motor. In a certain feed pulse interval, it is the speed of the ideal sinusoid at a certain moment. The precision achieved is the difference between the area of ​​the curved trapezoid and the unit rectangle. The absolute value. The key to this method is that the computer used must have the processing power of the trigonometric function, and has a higher computing speed, otherwise it is difficult to perform high-speed embroidery.
Micro Usb,Micro Usb To Usb C,Usb C To Micro Usb,Micro Usb Type C
Dongguan Swan Electronic Technology Co., Ltd , https://www.swanconnector.com